



在看到爬树机器人蛇和机器人鳗鱼的研究视频后,我开始启动这个项目。这是我第一次尝试使用蛇形运动建造机器人,但这不会是我的最后一次!
下面我概述了2种不同蛇的构造以及用于3D打印的文件以及关于实现蛇形运动的代码和算法的讨论。如果您希望继续学习更多内容,在阅读本教程之后,我建议您阅读页面底部参考部分中的链接。
这个讲义在技术上是一个二合一,我解释了如何制作2种不同版本的机器人蛇。如果您只对构建其中一条蛇感兴趣,请忽略其他蛇的说明。这两条不同的蛇将从这里开始使用以下短语互换:
1. 单轴蛇,1D蛇,或黄色和黑色蛇
2. 双轴蛇,2D蛇或白蛇
当然,你可以用你想要的任何颜色的灯丝打印蛇。两条蛇之间的唯一区别是,在2D蛇形中,每个马达相对于前一个旋转90度,而在1D蛇中,所有马达都在一个轴上对齐。
最后一条前言是,虽然我的每只蛇只有10个舵机,但是可以用或多或少的舵机制造蛇。需要考虑的一点是,使用较少的伺服系统,您将获得较少的成功运动,并且使用更多的伺服系统,您可能会更成功地使用蛇形运动,但您需要考虑成本,电流消耗(参见后面的说明)和引脚数量可在Arduino上找到。随意改变蛇的长度,但请记住,您还需要更改代码以解释此更改。
第1步:组件
这是一条蛇的零件清单,如果你想制作两条蛇,你需要加倍组件的体积。
· 10台MG996R伺服电机*
· 1.75mm 3D打印灯丝
· 10个滚珠轴承,零件编号608(我从Jitterspin fidget旋转器的外缘打捞出来的矿井)
· 20个小型滚珠轴承,零件编号r188,用于车轮**(我从Jitterspin fidget旋转器内部回收矿井)
· 40个十字头螺钉6-32 x 1/2“(或类似)
· 8个较长的螺钉(我没有零件编号,但它们的直径与上面的螺钉相同)
· 至少20件4英寸拉链(由你决定使用多少)
· 每个5米红色和黑色20规格线或更厚***
· 标准22规格电线
· 30个公头针(分为10批3个)
· Arduino Nano
· 3D打印部件(见下一节)
· 某种形式的电源(请参阅“为蛇提供动力”部分以获取更多信息),我个人使用了改进的ATX电源
· 1000uF 25V电解电容器
· 各种尺寸的热缩管,焊锡,胶水等杂件工具
*您可以使用其他类型,但您需要重新设计3D文件以适应您的伺服系统。此外,如果你尝试使用像sg90这样的较小的伺服器,你可能会发现它们不够强大(我没有测试过这个并且由你来实验)。
**你不需要在轮子上使用小型滚珠轴承,我只是躺在那里。或者,您可以使用乐高轮或其他玩具轮。
***这根导线可能有高达10安培的电流,太薄,电流会熔化它。
第2步:3D打印组件
如果你正在制作一维蛇打印这些碎片。
如果你正在制作2D蛇纹这些碎片。
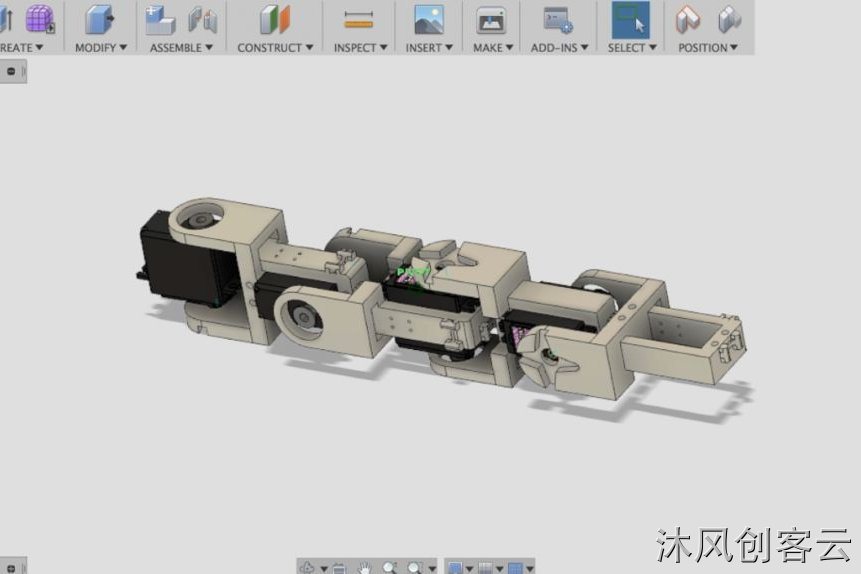
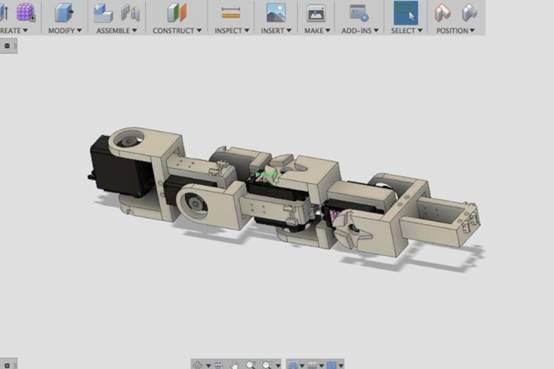
重要提示:规模可能有误!我在Fusion 360中设计我的组件(以mm为单位),将设计作为.stl文件导出到MakerBot软件中,然后将其打印在Qidi Tech打印机(MakerBot Replicator 2X的克隆版本)上。在这个工作流程的某个地方有一个错误,我的所有打印出来都太小了。我一直无法识别错误的位置,但暂时修复了MakerBot软件中每个打印尺寸缩放到106%,这解决了这个问题。
鉴于此,请注意,如果您打印上面的文件,它们可能会被错误地缩放。我建议在打印之前打印一件并检查它是否适合您的MG996R伺服。
如果你打印任何文件,请让我知道结果是什么:如果打印太小,恰到好处,太大,多少百分比。通过作为社区一起工作,我们可以使用不同的3D打印机和.stl切片器来解决错误的位置。一旦问题得到解决,我将更新此部分和上面的链接。
第3步:组装蛇








两种版本的蛇的装配过程大致相同。唯一的区别是在2D蛇形中,每个电机相对于前一个旋转90度,而在1D蛇中,所有电机都在一个轴上对齐。
首先拧下伺服,保存螺丝,取下黑色塑料框架的顶部和底部,小心不要丢失任何齿轮!将伺服滑动到3D打印的框架中,如上图所示。更换伺服外壳的顶部,并用四个6-32 1/2“螺钉将其拧紧到位。保存伺服框架的底部(如果您想在以后的项目中再次使用它)并将其更换为3D印刷外壳,唯一的区别是滚珠轴承滑动的附加旋钮。将伺服器拧回到一起,重复10次。
重要提示:在继续之前,您必须将代码上传到Arduino并将每个伺服器移动到90度。如果不这样做,可能会导致您断开一个或多个伺服和/或3D打印的框架。如果您不确定如何将伺服器移动到90度,请参阅本页。基本上将伺服的红线连接到Arduino上的5V,棕色线连接到GND,黄线连接到数字引脚9,然后上传链接中的代码。
现在每个伺服都在90度,继续:
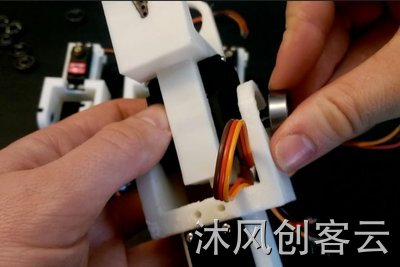
通过将3D打印的旋钮从一个伺服盒插入第二个片段的孔中来连接10个片段,然后用一点力将伺服器的轴推入其孔中(为清晰起见,请参见上图和视频)。如果您正在制作1D蛇,则所有线段都应对齐,如果您正在制作2D蛇,则每个线段应旋转90度到前一个线段。请注意,尾部和头部框架只是其他部分长度的一半,连接它们但是在我们完成接线之后才对金字塔形状的部件进行注释。
安装x形伺服臂并将其拧紧到位。将滚珠轴承滑过3D打印旋钮,这需要将两个半圆柱轻轻挤压在一起。根据您使用的灯丝品牌和填充密度,柱子可能太脆而且卡扣,我不认为情况会如此,但是不要过度用力。我个人使用含有10%填充物的PLA长丝。一旦滚珠轴承打开,它应该被旋钮上的悬伸锁定。
第4步:电路




两条机器人蛇的电路相同。在布线过程中,确保每个线段都有足够的布线空间完全旋转,特别是在2D蛇形中。
以上是仅有2个伺服电机的接线电路图。我尝试使用10个伺服电路进行电路绘图,但它过于拥挤了。这张照片和现实生活中唯一的区别是你需要并联8个伺服电机并将PWM信号线连接到Arduino Nano上的引脚。
在连接电源线时,我使用了一根18号线(厚度足以承受10安培)作为沿蛇长度延伸的主要5V线。使用剥线钳,我以10个规则的间隔移除了一小部分绝缘体,并从这些间隔中的每一个焊接了一小段电线,一组3个插头。对于黑色18规格GND线和第二个插头引脚,再次重复此操作。最后将较长的导线焊接到第3个插头引脚,该引脚将PWM信号从蛇形头部的Arduino Nano传送到伺服系统(导线必须足够长才能到达,即使分段弯曲)。根据需要安装热缩管。将3个插头引脚连接到伺服电线的3个母插头引脚。对10个伺服系统中的每个伺服系统重复10次。最终实现的是并行连接伺服系统并将PWM信号线连接到Nano。公/母头销的原因是,如果它们在没有拆焊的情况下断裂,您可以轻松拆分并更换伺服系统。
使用电容器和螺钉端子将GND和5V电线焊接到尾部的3x7孔穿孔板上。电容器的目的是消除启动伺服系统时引起的任何电流消耗尖峰,可以重置Arduino Nano(如果你没有电容器,你可以在没有电容器的情况下离开,但最好是安全的) 。请记住,电解电容器的长插脚需要连接到5V线路,而较短的插脚连接到GND线路。将GND线焊接到Nano的GND引脚,将5V线焊接到5V引脚。请注意,如果您使用不同的电压(参见下一节),请说一个7.4V的Lipo电池,然后将红线连接到Vin引脚,而不是5V引脚,这样做会破坏引脚。
将10根PWM信号线焊接到Arduino Nano上的引脚。我按以下顺序连接了我,你可以选择以不同的方式连接你的,但只记得你需要更改代码中的servo.attach()行。如果你不确定我在谈论什么,只需按照我的方式连线,你就不会有问题。从蛇的尾部伺服到蛇的头部,我按照以下顺序连接了我的蛇。将信号引脚连接到:A0,A1,A2,A3,A4,A5,D4,D3,D8,D7。
使用拉链来清理布线。在继续检查之前,所有部分都可以移动,并且有足够的空间让电线移动而不会被拉开。现在接线已完成,我们可以拧上头部和尾部金字塔形的帽子。请注意,尾部有一个用于系绳出来的孔,头部有一个用于Arduino编程电缆的孔。
第5步:为Snake供电


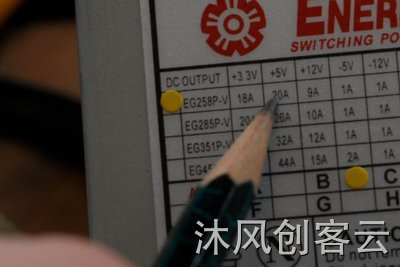
由于伺服系统并联连接,它们都获得相同的电压,但必须加上电流。查看MG996r伺服系统的数据表,他们可以在运行时绘制高达900mA的电流(假设没有停止)。因此,如果所有10个伺服系统同时移动,则总电流消耗为0.9A * 10 = 9A。因此,正常的5v,2A墙壁插座适配器将无法正常工作。我决定修改ATX电源,能够在20A时达到5v。我不打算解释如何做到这一点,因为已经在Instructables和YouTube上进行了很多讨论。在线快速搜索将向您展示如何修改其中一个电源。
假设您已经修改了电源,只需在电源和蛇形螺钉端子之间连接一根长绳即可。
另一种选择是使用板载锂电池组。我没有试过这个,所以你需要为电池设计一个安装座并将它们接入。请记住伺服电机和Arduino的工作电压,电流消耗(不要焊接5v以外的任何东西) Arduino上的5v引脚,如果有更高的电压则转到Vin引脚)。
第6步:测试一切正常
在继续之前让我们测试一切正常。上传测试代码,你的蛇应该在0-180之间单独移动每个伺服,然后通过直线放置完成。如果没有,则出现问题,很可能是接线不正确或者舵机最初没有居中于90度,如“蛇的组装”部分所述。
第7步:代码
目前没有蛇的遥控器,所有动作都是预编程的,你可以选择你想要的。我将在版本2中开发一个遥控器,但是如果你想远程控制它,我建议你看一下Instructables上的其他教程,并使蛇与蓝牙兼容。
如果您正在使1D snake上传此代码。
如果您正在使2D蛇上传此代码。
我鼓励您使用代码,进行自己的更改,并创建新的算法。阅读接下来的几个部分,了解每种类型的运动的详细解释以及它的代码如何工作。




 冀公网安备 13010402001320号
冀公网安备 13010402001320号