



我决定增加一个双挤压机翼和机翼支撑,增加船尾端部尺寸支撑机翼和机翼支撑,增加主轴长度以补偿增加的船体尺寸,最后设计了双挤压盖。
一言以蔽之:我设计的WiFi螺旋桨船II是“防溅”的,不是“防水”,所以如果有浪花、孙女、侄女、侄子等, WiFi螺旋桨船II可能会变成“潜水艇”,祝你好运。
第1步:购买,打印和准备零件。
WiFi Propeller Boat II与原版一样,是印刷,组装和布线的挑战,需要充分的耐心才能完成。
在您开始之前,请注意WiFi Propeller Boat II包含可能不适合您的构建区域的大型扁平组件,如果这样,翘曲可能会成为一个重要问题,因此请使用边缘和最佳技术来构建板粘合。还有一些非常小的部件(我在车间丢失了一些很小的部件)和薄壁部件(薄至1.2mm),因此在打印之前,使用切片机在层模式下测试每个部件以确认您的打印机能够打印零件。
我为WiFi Propeller Boat购买了以下部件:
· 1个带有Oled显示屏的Heltec WiFi套件32(在线)。
· 1 Timesetl L298N电机驱动控制器(在线)。
· 2 Micro 130直流电机(在线)。
· 2 10×15乘4mm密封球轴承(我使用的是ProtekRC PTK-10046,当地的爱好商店)。
· 1 Ares AZSZ2503 1200 mAh 2节/ 2S 7.4V 25C Lipo电池(当地爱好商店)。
· 1个JST母头连接器(尺寸适合电池,当地爱好商店)。
· 4个3×5mm固定螺丝(当地的爱好商店)。
· 1个2k欧姆电阻器(当地爱好商店)。
· 1个1k欧姆电阻器(当地爱好商店)。
您还需要氰基丙烯酸酯胶,伺服胶带,丙烯酸填缝剂,尖嘴钳和各种精密手工工具,珠宝商文件,剪线钳,剥线钳,焊料和烙铁,以及可能的透明PLA安全喷漆。
我打印了“Axle,Propeller.stl”,“Axle.stl”,“Bolt,8 by 1.25mm.stl”,“Bushing.stl”,“Cross Journal.stl”,“Propeller Port.stl”,“Propeller Starboard .stl“,”Yoke Motor.stl“和”Yoke.stl“在.1mm层高度,100%填充。我将剩余的组件打印在.15mm层高度,20%填充。我用PLA支持打印了“Cover.3mf”和“Deck.stl”,使用Ultimaker Breakaway支持“Propeller Port.stl”和“Propeller Starboard.stl”,其余部分没有支持。
我打印了以下数量的每个部分:
· 2轴,Propeller.stl
· 2 Axle.stl
· 6螺栓,8乘1.25mm.stl 2 Bushing.stl
· 1 Cover.3mf(我已经将Cover.stl包含在单个挤出中)
· 4 Cross Journal.stl
· 1 Deck.stl
· 2 Hull.stl
· 1 Mount,Wing.stl
· 1螺旋桨Port.stl
· 1螺旋桨Starboard.stl
· 1 Wing.3mf(我已将Wing.stl包含在单个挤出中)
· 2 Yoke Motor.stl
· 6 Yoke.stl
在装配之前,测试配合和装饰,锉刀,砂子等所有部件,以便移动表面的平滑移动,以及非移动表面的紧密配合。根据您选择的颜色和打印机设置,可能需要或多或少的修剪,归档和/或打磨。小心地记录与构建板接触的所有边缘,以确保所有构建板“渗出”被移除并且所有边缘都是平滑的。我使用小珠宝商文件和足够的耐心来执行这一步。该模型使用螺纹组件(8×1.25mm),因此可能需要8×1.25mm的螺纹和模具来清洁螺纹部件。
关于船体,在打印之后,将6个螺栓完全插入船体顶部的螺纹孔中,将每个船体浸没在水下约一分钟,取出,干燥并摇动以查看是否有任何水泄漏到船体中。如果是这样的话,在船体上喷洒几层透明的PLA安全喷漆,让其干燥,然后再次测试。
第2步:编程WiFi套件32。
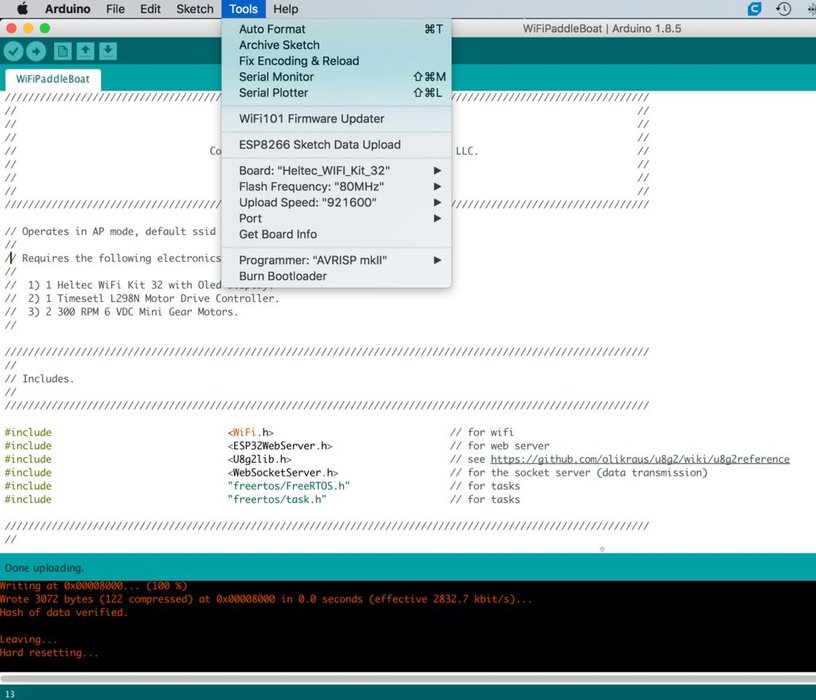
WiFi Propeller Boat是在Arduino环境中为ESP32芯片编写的。网上有很多优秀的教程,详细介绍了Arduino环境的使用,因此我不会在这里复制它们。
关于WiFi Propeller Boat网页,我使用了html“canvas”元素作为图形,并使用画布事件“touchstart”,“touchmove”和“touchend”进行控制。我相信该软件应该适用于iOS以外的支持触控的设备,但是无法确认它会如何。
将Heltec Wifi Kit 32通过USB电缆连接到计算机,打开Arduino环境并加载文件“WiFiPropellerBoat.ino”。在文件的顶部有一系列包含文件(以“.h”结尾的文件)。确保您的库与Arduino环境中安装的每个包含文件相关联。
WiFi Propeller Boat在接入点模式下运行(此模式类似于各种小型运动相机),因为您将智能手机wifi直接连接到WiFi Propeller Boat wifi。我使用ssid“WiFiPropellerBoat”编写了“WiFiPropellerBoat”,密码为“WiFiPropellerBoat”,IP地址为“192.168.20.20”。在编译软件并将其下载到WiFi套件32之前,您可能希望更改这些参数以满足您的需要。
安装所有库并设置ssid,密码和IP地址后,编译并将软件下载到WiFiKit 32.下载后,WiFi Kit 32 OLED应显示标题,版权,最后显示AP名称和IP地址。转到智能手机上的wifi设置,然后使用密码登录WiFi Kit 32接入点ssid。
完成wifi连接后,打开智能手机上的Web浏览器并导航到IP地址。如果成功,WiFi Kit 32 OLED的中间应出现闪烁的“停止标志”样式图像,智能手机显示屏上应出现蓝点。如果将蓝点拖到显示屏顶部,则应在WiFi Kit 32 OLED上显示向上箭头和两个电源指示灯。拖动智能手机显示屏周围的蓝点并检查OLED响应。
第3步:接线。

为了将电动机速度控制器连接到电动机和WiFi套件32,我执行了以下步骤。端口(左)电机连接到电机速度控制器OUT4(“ - ”)和OUT3(“+”)螺丝端子。将100毫米长的AWG 16红线焊接到端口电机“+”端子,并将100毫米长的AWG 16黑线焊接到端口电机“ - ”端子。注意到电机上的焊片非常脆弱,使用的小氰基丙烯酸酯点胶在电线和电机端盖之间。将这些电线的自由端镀锡,然后将红线的镀锡自由端连接到电机速度控制器OUT3端子,将黑色电线的镀锡自由端连接到OUT4端子。
右舷(右)电机连接到电机速度控制器OUT1(“ - ”)和OUT2(“+”)螺丝端子。将一根100毫米长的AWG 16红线焊接到右舷马达“+”端子上,并将一根100毫米长的AWG 16黑线焊接到右舷马达“ - ”端子上。将这些电线的自由端镀锡,然后将红线的镀锡自由端连接到电机速度控制器OUT2端子,将黑色电线的镀锡自由端连接到OUT1端子。
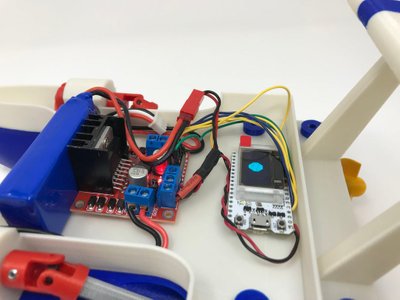
在电机速度控制器板上,6针插头式连接器提供电机控制接口。我使用了6针Arduino风格的母头连接器,并在此插头连接器和Heltec WiFi套件32之间焊接控制线,如下所示:
在WiFi套件32上的引脚26和电机速度控制器接头上的ENA接头引脚之间焊接100mm长的AWG 26绿线。
在WiFi套件32上的引脚12和电机速度控制器接头上的IN1接头引脚之间焊接100mm长的AWG 26蓝色线。
在WiFi套件32上的引脚13和电机速度控制器接头上的IN2插头引脚之间焊接一条长度为100毫米的AWG 26黄线。
在WiFi套件32上的引脚27和电机速度控制器接头上的IN3插头引脚之间焊接100mm长的AWG 26蓝色线。
在WiFi套件32上的引脚14和电机速度控制器接头上的IN4插头引脚之间焊接一条长度为100毫米的AWG 26黄线。
在WiFi套件32上的引脚25和电机速度控制器接头上的ENB插头引脚之间焊接100mm长的AWG 26绿线。
电机速度控制器还在我用于为WiFi套件32供电的3针螺钉端子上提供稳压5vdc。要将电机速度控制器的电源连接到WiFi套件32,请将100毫米长的AWG 26红线焊接到WiFi套件32 5V引脚。接下来,将100毫米长的AWG 26黑色线焊接到WiFi套件32 GND引脚。将两根电线的自由端镀锡,然后将红线的镀锡自由端连接到3针螺钉连接器上的电机速度控制器+ 5V引脚,并将黑线的镀锡自由端连接到电机速度控制器GND引脚在3针螺丝连接器上。
整个电路由7.4vdc 1200ma LiPo电池供电。要将电池连接到电机速度控制器,请将JST母头红色线连接到3针螺钉端子上的电机速度控制器+ 12V针脚,将JST母头连接器黑色线连接到3针螺钉端子上的GND针脚(这个终端与WiFi Kit 32地面共享。
最后,要监控电池电压,将2k欧姆电阻的一端连接到3针螺钉端子上的电机速度控制器+12针。然后将1k欧姆电阻的一端连接到3针螺钉端子上的电机速度控制器GND引脚。接下来,将电阻器的两个自由端焊接在一起,然后在电阻器焊接接头和WiFi套件32的引脚36之间焊接100mm长的AWG 26黄色线。
仔细检查所有接线。
第4步:组装驱动轴。









需要两个下轭组件和两个上轭组件来组装驱动轴。
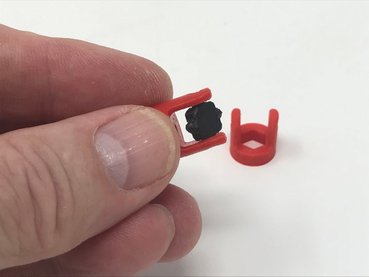
下轭组件所需的部件是2“Yoke.stl”和1“Cross Journal.stl”。首先将交叉日志捕捉到其中一个轭中,如图所示。我用了一个针鼻钳来协助这个步骤。接下来,小心地将剩余的轭卡在十字轴颈上。完成后,组件应在两个轴上轻松平稳地旋转。对第二个下轭组件重复此过程。
组装上磁轭所需的部件是1“Yoke.stl”,1“Yoke Motor.stl”和1“Cross Journal.stl”,并且它们与下磁轭组件组装相同。对第二个上轭组件重复此过程。
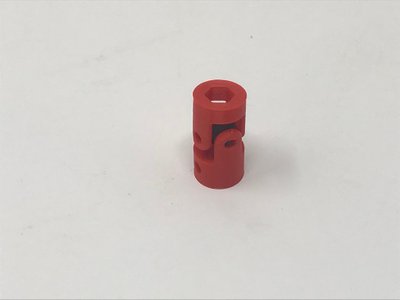
完成上轭和下轭组件后,接下来将“Propeller Port.stl”按到“Axle,Propeller.stl”上。这应该是非常紧密的。使用“Propeller Starboard.stl”和剩余的螺旋桨轴重复此过程。
然后将一个“Bushing.stl”按入10 x 15 x 4mm密封轴承中的一个。这应该是紧密配合。用剩余的衬套和轴承重复此过程。
如图所示,将其中一个衬套/轴承组件压到其中一个螺旋桨轴上,距离轴末端4mm。这应该是紧密配合。用剩余的组件重复此过程。
如图所示,将其中一个下轭架组件按到其中一个螺旋桨轴上,确保轴的末端与轭架的内表面齐平,如图所示。这应该是紧密配合。用剩余的组件重复此过程。
如图所示,将一个“Axle.stl”按入下轭架组件上的一个自由轭架,确保轴的末端与轭架的内表面齐平,如图所示。这应该是紧密配合。用剩余的组件重复此过程。
如图所示,将一个上轭组件按到“Axle.stl”的自由端,确保轴的末端与轭的内表面齐平,如图所示。这应该是紧密配合。用剩余的组件重复此过程。
使用1.5mm六角扳手,将3 x 5mm的固定螺钉拧入电机支架。
第5步:最终大会。

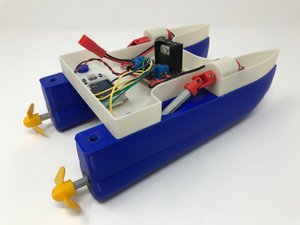


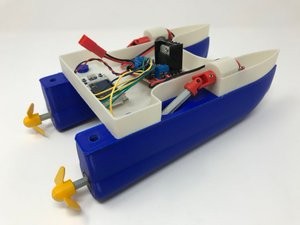
在“Deck.stl”的4个孔的下侧周围涂上一层硅填缝剂,然后使用两个“Bolt,8 by 1.25mm.stl”将甲板下的一个“Hull.stl”固定,如图所示。用剩余的船体重复这个过程。
如图所示,将电机按到甲板上的位置。电机线将靠近船体外部,电机通风口将朝向甲板电机支架中的椭圆孔。
小心地将螺旋桨端口轴组件,电机支架端部首先插入端口船体的后孔,将其完全滑入到位,直到电机支架完全接合在端口电机轴上,并且轴承与外部船体表面齐平(这将是一个紧密的契合)。小心地拧紧电机支架上的两个固定螺钉,直到支架牢固地固定在电机上。确保螺钉牢固地与电机轴接触,就好像电机轴在电机磁轭内滑动一样,会产生摩擦,从而产生热量,这会使电机磁轭变形。使用右舷船体上的螺旋桨右舷轮轴组件重复此过程。
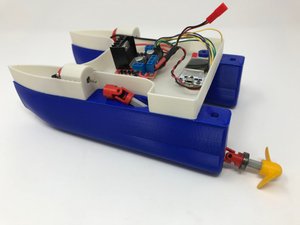
将电动机速度控制器和WiFi套件32放置到如图所示的位置,并用伺服胶带固定到位。
将机翼按到机翼支架上(这应该是非常紧密的配合,如果没有,使用氰基丙烯酸酯将其固定到位)使用剩余的两个“螺栓,8乘1.25mm.stl”,将机翼组件连接到机翼后部如图所示的船体。
如图所示放置电池。
将电池插入电机速度控制器并检查显示操作是否正常。
第6步:测试。

装配完成后,在第一次水测试之前,我执行以下任务:
将WiFi Propeller Boat II放置在平坦的表面上,螺旋桨自由悬挂(在边缘上方)。
插上电池。
将支持wifi的设备连接到WiFi Propeller Boat wifi(我的WiFi Propeller Boat ssid是“WiFiPropellerBoat”)。
在启用wifi的设备上打开Web浏览器。
导航到WiFi Propeller Boat ip地址(我的WiFi Propeller Boat IP地址是192.168.20.20)。
当Web浏览器上出现蓝点时,WiFi Kit 32 OLED上会出现“停止标志”样式图像。将点拖动到显示屏的顶部中心,OLED显示屏显示向上箭头和2个功率电平指示器(一个用于端口电机,另一个用于右舷电机)。确保螺旋桨转向正确的方向。将点移动到显示屏的底部中心,观察正确的OLED指示和螺旋桨移动。
完成后,将盖子放在甲板上的电子设备托架上,将WiFi Propeller Boat II放入水中,然后离开!
这就是我打印,编程,有线和组装WiFi Propeller Boat II的方式。
希望你喜欢它!




 冀公网安备 13010402001320号
冀公网安备 13010402001320号
{kind=link}